黑暗拍卖会第七卷:Android Camera Framework Stream(三)
来源:百度文库 编辑:九乡新闻网 时间:2024/04/26 20:39:41
7. 那么现在的关键就是 Client 类了·进一步跟进: CameraService::Client::Client(const sp& cameraService, const sp& cameraClient, pid_t clientPid) { ….. mCameraService = cameraService; mCameraClient = cameraClient; mClientPid = clientPid; mHardware = openCameraHardware(); } 将 cameraService 和 cameraClient 的实例分别赋值给了 Client 的类成员变量。 另外 openCameraHardware() 是值得注意的地方,也就是连接上层应用和底层驱动的关键,通过调用 openCameraHardware() 得到了一个 CameraHardwareInterface 实例对象,并赋值给自己的类成员: ` sp mHardware; 对 hardware 的操作就是通过该对象完成的,所以说真正意义上的功能实现其实就是在这里,即 client 类的函数接口调用。 对于 hardware 的东东咱们暂时不去关注吧。 那么我们再次仔细研究下 Client 类的继承关系 ( 这些继承关系很容易混乱,涉及到较多的多态类型转换 ) ,这个其实往往都很关键: 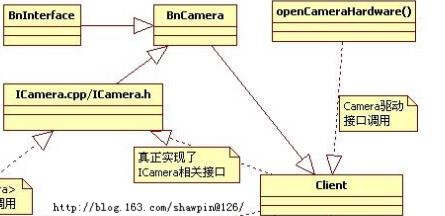 Client 继承于 BnCamera ,而 BnCamera 则继承于 ICamera ,也就是说 Client 继承了 ICamera, 实现了 ICamera 中的函数。 进而发现,原来绕一个大圈,把最开始的图简化下:
Client 继承于 BnCamera ,而 BnCamera 则继承于 ICamera ,也就是说 Client 继承了 ICamera, 实现了 ICamera 中的函数。 进而发现,原来绕一个大圈,把最开始的图简化下: 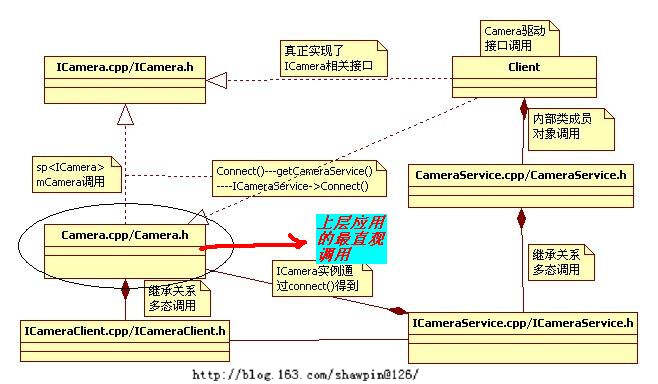
8. 除此之外还有两个步骤或许需要去研究下: 先从单一函数去跟进,看具体一些 callback 的实现流程: // callback from camera service void Camera::notifyCallback(int32_t msgType, int32_t ext1, int32_t ext2) { sp listener; { Mutex::Autolock _l(mLock); listener = mListener; } if (listener != NULL) { listener->notify(msgType, ext1, ext2); } } 这是 Camera 类中一个 callback 函数实现,但其本质在哪?先看 camera 类的继承关系:
& data) = 0; virtual void dataCallbackTimestamp(nsecs_t timestamp, int32_t msgType, const sp& data) = 0; }; 其中 notifyCallback() 又是纯虚函数 , 则同样说明实现在其子类 BpCameraClient 中: // generic callback from camera service to app void notifyCallback(int32_t msgType, int32_t ext1, int32_t ext2) { LOGV("notifyCallback"); Parcel data, reply; data.writeInterfaceToken(ICameraClient::getInterfaceDescriptor()); data.writeInt32(msgType); data.writeInt32(ext1); data.writeInt32(ext2); remote()->transact(NOTIFY_CALLBACK,data, &reply, IBinder::FLAG_ONEWAY); } 然后通过 Binder 通讯调用到 BnCameraClient 中实现: status_t BnCameraClient::onTransact( uint32_t code, const Parcel& data, Parcel* reply, uint32_t flags) { switch(code) { case NOTIFY_CALLBACK: { LOGV("NOTIFY_CALLBACK"); CHECK_INTERFACE(ICameraClient, data, reply); int32_t msgType = data.readInt32(); int32_t ext1 = data.readInt32(); int32_t ext2 = data.readInt32(); notifyCallback(msgType, ext1, ext2); return NO_ERROR; } break; …. } 进而调用到了 Camera.cpp 中的函数实现了,但或许你有疑问,这些 callback 是涉及到一些驱动的 callback ,哪怎么跟驱动联系起来那? 结合之前对 hardware 接口调用的类 Client ,进一步可以发现 callback 的处理同样是在 Client 类实例化的时候: CameraService::Client::Client(const sp& cameraService, const sp& cameraClient, pid_t clientPid) { ….. mHardware->setCallbacks( notifyCallback , dataCallback, dataCallbackTimestamp, mCameraService.get()); ….. } 调用了 mHardware 将 callback 传入,但此处的 notifyCallback 并不是 camera.cpp 中的函数,而是 client 类的 notifyCallback 函数。 再继续看 client 类中的 notifyCallback 函数实现: void CameraService::Client::notifyCallback(int32_t msgType, int32_t ext1,int32_t ext2, void* user) { ….. default: sp c = client->mCameraClient; if (c != NULL) { c->notifyCallback(msgType, ext1, ext2); } break; ….. } 通过得到 ICameraClient 实例进而调用到了具体的对象 Camera 的 notifyCallback() 函数。这个地方估计会遇见跟 ICameraService 函数调用一样的问题, ICameraClient 函数调用所需要的函数实例在哪? 记得上述 ICameraService 讲到的 connect() 函数嘛?其中有一个参数不能被忽略掉的,就是 ICameraClient ,但它在真正传入的时候却是一个 ICameraClient 子类 camera 的实例对象。 CameraService: sp CameraService::connect(const sp& cameraClient) { ….. // create a new Client object client = new Client(this, cameraClient , callingPid); ….. } Client: CameraService::Client::Client(const sp& cameraService, const sp& cameraClient , pid_t clientPid) { …. mCameraService = cameraService; mCameraClient = cameraClient ; …. } 这样就清楚了,其实 Client 在调用设置 callback 的调用最终还是调用到了 camera.cpp 中的 callback 函数,进而将具体内容通过 callback 反馈给上层应用做出相应的处理。
8. 除此之外还有两个步骤或许需要去研究下: 先从单一函数去跟进,看具体一些 callback 的实现流程: // callback from camera service void Camera::notifyCallback(int32_t msgType, int32_t ext1, int32_t ext2) { sp
Android Camera Framework Stream(三)
Android Camera Framework Stream(一)
Android Camera Framework Stream(二)
Android camera
android Camera模块分析
【android camera专题文章】001.Android Camera架构浅析
Android的Camera架构介绍
Android的Camera架构介绍
Your Stream
Android程序开发初级教程(三)
MPEG transport stream
TS (Transport stream) 格式
.NET Framework
Android
android
Android
Android高手进阶教程(三)之 ----Android 中自定义View的应用
使用 Spring Framework 设计和开发 SCA 组件,第 1 部分: 三剑客:Spring、SCA 和 Apache Tuscany
.NET Framework 3|Microsoft .NET Framework 3.5...
Adobe Camera Raw 教程
Embedding camera applications
Camera RAW 使用手册
玩转Camera Rawa
CAMERA RAW 使用方法a